Flight Control Design Methodology and Examples
This section presents several examples of flight control design using the Flixan program dynamic modeling and control design tools. The examples include a variety of vehicles such as atmospheric aircraft, launch and re-entry vehicles and spacecraft, including flex modes. The examples analyze classical stability, performance to disturbances, and robustness to parameter variations using Singular Values and Mu-Analysis.
LQR/LQG Control Design Program and Examples
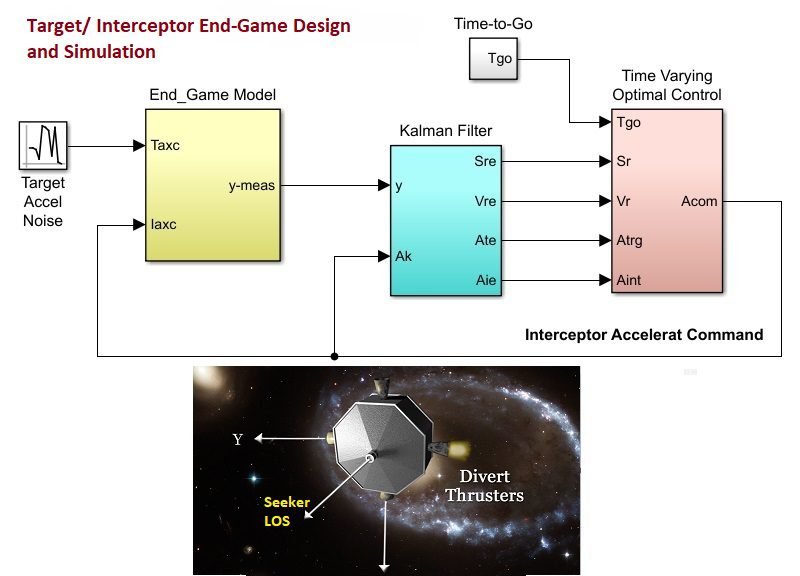
In this section we present examples of using the Flixan LQR program to design control laws for dynamic systems, such as an overhead crane, an interceptor spacecraft and a missile control design. The overhead crane example consists of two masses connected with a rope and the bottom mass is suspended by the rope from the top mass. The design requirement is to control the position of the bottom mass by applying a control force on the top mass. In the end-game intercept example we are designing a guided intercept between two space vehicles: a kinetic interceptor and a target. The interceptor has already been placed in a collision course with the target and the vehicle is no longer accelerating but it is drifting towards the target. Its translational motion perpendicular to the LOS is controlled by divert thrusters. The end-game guidance is a closed-loop dynamic engagement of the interceptor attempting to improve the impact precision especially when the target is randomly accelerating. In the missile example we are designing the pitch and lateral control laws and analyzing stability.
H-Infinity Control Design Program and Examples
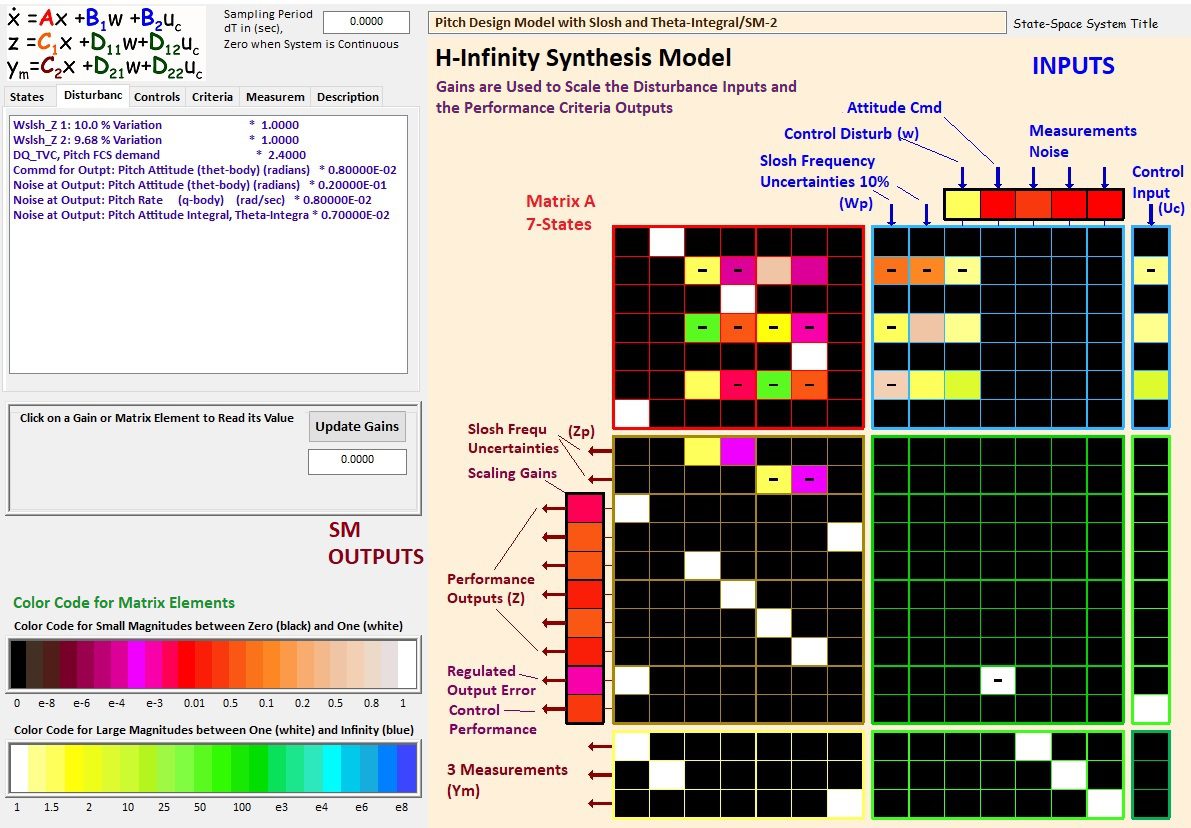
In this section we are presenting examples of using the Flixan H-Infinity program to design control laws for different dynamic systems. Several examples are presented, beginning with the overhead crane position control, balancing an inverted pendulum on a cart, a Space-Shuttle ascent max-Q design, a launch vehicle control design during second stage with unstable sloshing tanks, the design of a Space Station attitude control and CMG momentum management system, and a classical launch vehicle design.
Analyzing Robustness to Uncertain Parameters Examples
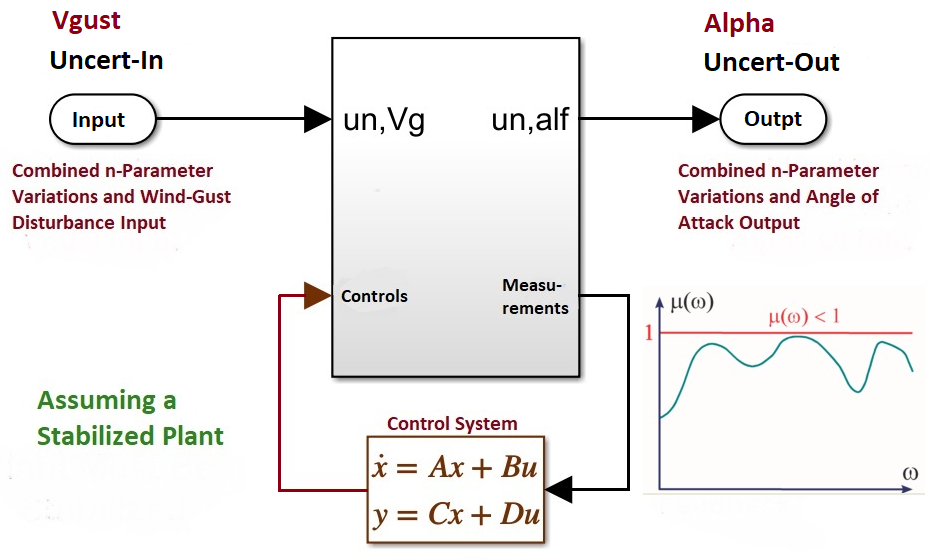
In this section we are presenting several examples of using the Flixan program to analyze the control system robustness to parameter uncertainties. We begin with a glider vehicle which is controlled by aerosurfaces, we define the uncertainties in the aero data and mass properties and analyze the system robustness to uncertainties using mu-analysis. In the Space Shuttle example, we analyze the system stability and robustness to 45 simultaneously varying parameter uncertainties. In the next example we have a flexible spacecraft with 60 flex modes and we analyze the spacecraft robustness to variations in mass properties, mode frequencies and reaction wheel parameters, misalignments, etc. The next example is a flexible spacecraft controlled by an array of single-gimbal CMGs. We analyze stability and robustness to uncertainties, such as, mass properties, mode frequency variations, CMG axes misalignments, momentum variations, etc.